LERNREISE MENSCH - ROBOTER - KOLLABORATION
Der Weg zum Mensch - Robotik - Arbeitsplatz für schwerbehinderte Produktionsmitarbeiter

Manueller Ausgangsarbeitsplatz: Handhebelpresse
01. Der Mitarbeiter steckt die zwei Düsenelemente manuell auf die Fügeposition der Handhebelpresse auf.
02. Durch Betätigen des Handhebels fügt der Mitarbeiter die Düsenelemente zusammen.
03. Der Mitarbeiter kontrolliert die Düsen mit der Kontroll–Leiste manuell auf Maßhaltigkeit.

Entwurf 1: Hohe Kollaborationsnähe
01. Der Mitarbeiter steckt die Düsen -
elemente manuell auf die V - förmig angeordneten Steckleisten auf.
02. Der Roboter fügt die Düsenelemente zusammen.
03. Der Mitarbeiter kontrolliert die Düsen manuell mit der Kontroll - Leiste.
Welche Nachteile treffen auf diesen Entwurf zu ?
Durch die Nähe zum Greifarm erschrecken die Mitarbeiter
leicht.
Die Fehlteile können in die falsche Schublade fallen.
Der Greifarm fährt lange Strecken auf dem Tisch ab, was Zeit kostet.
Der Greifarm kann an den entfernt liegenden Positionen nicht genug Druck auf die Düsen aufbringen.
Die Mitarbeiter können aufgrund der räumlichen Nähe verleitet sein, zu viel zu kommunizieren.

Entwurf 2: Drehteller
01. Der Mitarbeiter steckt die Düsen-
elemente manuell auf die Steckplätze des Werkstückträgers auf, der auf dem Drehteller angedockt ist.
02. Er fordert den Roboterarm durch Drehen des Drehtellers um 180 Grad an.
03. Der Roboter fügt die Düsenelemente zusammen.
04. Der Mitarbeiter dreht den Drehteller erneut um 180 Grad, so dass die vom Roboter gefügten Düsen wieder vor ihm liegen.
05. Er entnimmt sie vom Drehteller.
06. Er kontrolliert die Düsen mit der rechts von ihm angebrachten Prüfleiste manuell auf Maßhaltigkeit.
Welche Nachteile treffen auf diesen Entwurf zu ?
Für Mitarbeiter mit rheumatischen Erkrankungen sind die seitlichen Drehbewegungen hin zur Kontrollleiste belastend.
Der Drehwinkel des Greifarms ist zu klein, um alle drei Drehteller - Positionen erreichen zu können.
Der Roboter ist zu langsam, um drei Mitarbeiter gleichzeitig bedienen zu können.
Die Düsen können beim Drehen des Drehtellers herausgeschleudert werden.
Die Tischanordnung verbraucht viel Platz.
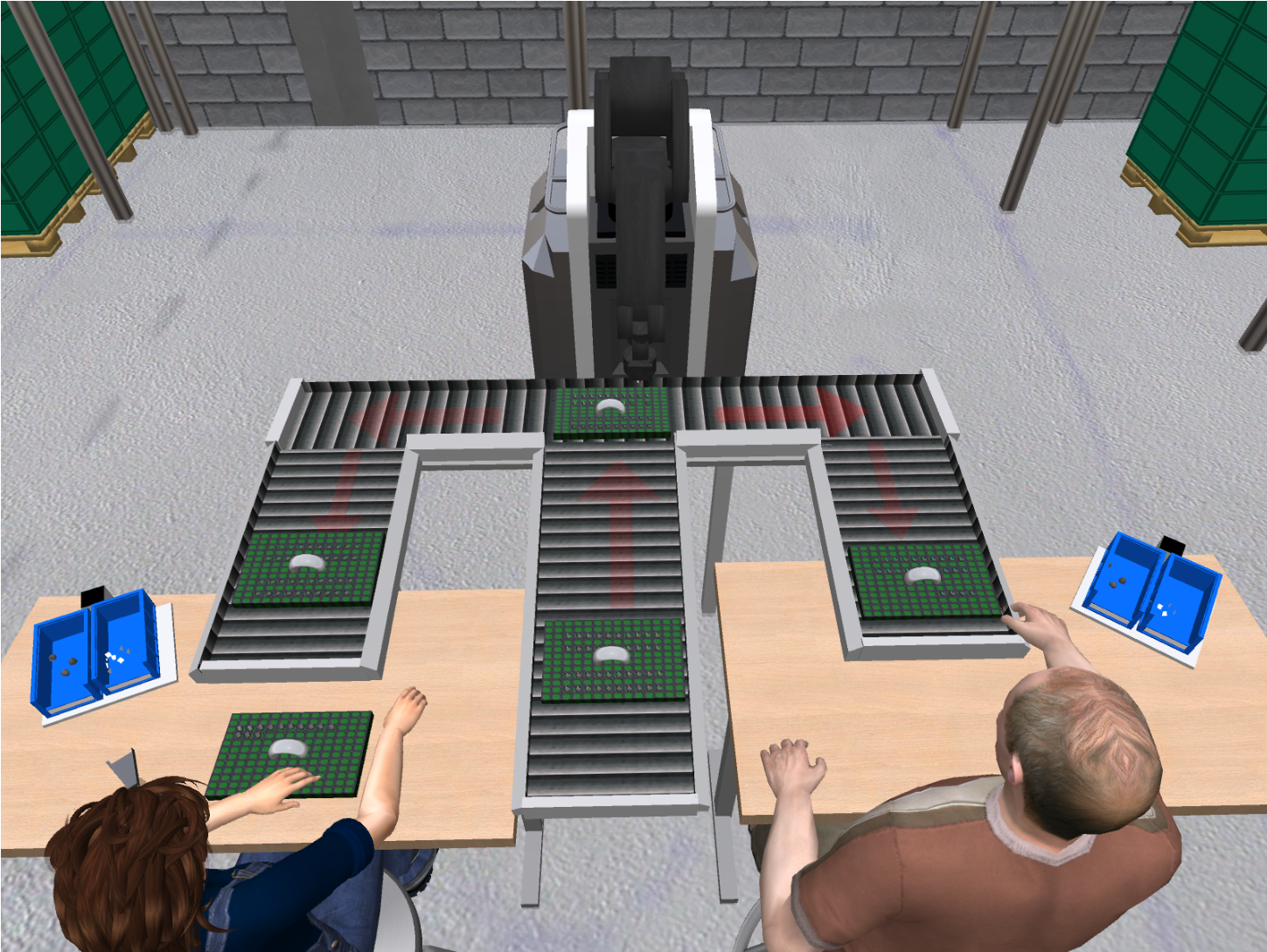
Entwurf 3: Rollenbahn
01. Der Mitarbeiter steckt die Düsen -
elemente manuell auf die Steckplätze des Werkstückträgers auf.
02. Er lässt den Werkstückträger über die mittlere, geneigte Rollenbahn zum Roboter laufen.
03. Der Roboter fügt die Düsenelemente zusammen und lässt den Werkstück -
träger über die äußere, gegenläufig ge -
neigte Rollenbahn zurück zum Mit -
arbeiter laufen.
04. Der Mitarbeiter entnimmt die Düsen vom Werkstückträger.
05. Er kontrolliert die Düsen mit der seitlich von ihm angebrachten Prüfleiste manuell auf Maßhaltigkeit.
Welche Nachteile treffen auf diesen Entwurf zu ?
Die Hände der Mitarbeiter können am Ende der Rollenbahn durch die heranrollenden Werkstückträger eingequetscht werden.
Durch den großen Abstand zwischen Mitarbeiter und Roboter besteht keine echte Mensch-Roboter-Kollaboration.
Wegen des Abstands können die Mitarbeiter den Greifarm nicht durch Berühren der Sensorhaut stoppen.
Da die Rollenbahn Gefälle hat, müssen die Mitarbeiter die Werkstückträger manuell ca. 20 cm hoch auf die Rollenbahn heben - das ist unergonomisch.
Beim Anstoßen der rollenden Werkstückträger an das Ende der Rollenbahn können die Düsen von ihren Steckplätzen geschleudert werden.

Entwurf 4: Übergabestelle
01. Der Mitarbeiter steckt die Düsen -
elemente manuell auf die Steckplätze des Werkstückträgers auf.
02. Er stellt den Werkstückträger in die Übergabestelle ein.
03. Der Roboter zieht den Werkstück -
träger zu sich heran, fügt die Düsen -
elemente zusammen und schiebt den Werkstückträger zum Mitarbeiter zurück.
04. Der Mitarbeiter entnimmt die Düsen vom Werkstückträger.
05. Er kontrolliert die Düsen mit der flexibel angebrachten Prüfleiste manuell auf Maßhaltigkeit.
Welche Nachteile treffen auf diesen Entwurf zu ?
Der Tisch wird schnell unordentlich, weil die Mitarbeiter die Arbeitsgeräte flexibel anordnen können.
Das Herauf- und Herunterfahren des Tischs bremst den Greifarm aus und kostet wertvolle Zeit.
Die Rampe in der Übergabestelle erhöht den Kraftaufwand beim Schieben des Werkstückträgers.
Das Spiel im Getriebe der höhenverstellbaren Tische trägt zur ungleichmäßigen Kraftaufbringung des Greifarms auf die Düsen bei.
Die Mitarbeiter werden leicht abgelenkt, weil das Fügen der Düsen durch den Roboter in ihrer Nähe geschieht.

Realisierter Mensch - Robotik - Arbeitsplatz
01. Der Mitarbeiter steckt die Düsen -
elemente manuell auf die Steckplätze des Werkstückträgers auf.
02. Er stellt den Werkstückträger in die Übergabestelle ein.
03. Der Roboter zieht den Werkstück -
träger zu sich heran, fügt die Düsen -
elemente zusammen und schiebt den Werkstückträger zum Mitarbeiter zurück.
04. Der Mitarbeiter entnimmt die Düsen vom Werkstückträger.
05. Er kontrolliert die Düsen mit der flexibel angebrachten Prüfleiste manuell auf Maßhaltigkeit.
